stepper motor
[′step·ər ‚mōd·ər]stepper motor
(hardware)stepper motor
A motor that rotates in small, fixed increments and is used to control the movement of the access arm on a disk drive. Contrast with voice coil.Stepper Motor
(also magnetic stepping motor), a synchronous motor in which current pulses supplied to stator windings are converted into discrete angular motions, or steps, of a rotor. A stepper motor may be either a salient-pole motor or a non-salient-pole motor. The field windings are on the stator, and the rotor has no winding. In a variable-reluctance stepper motor, the rotor is made of a soft magnetic material. In a permanent-magnet stepper motor, the rotor is made of a hard magnetic material.
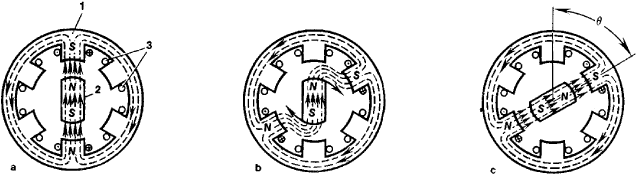
The current pulses are supplied from a power source to the field windings in sequence through a commutator. As a result, the direction of the magnetic flux in the space between the stator poles changes in discrete steps (Figure 1), causing the rotor to rotate through a certain angle θ. Each such rotation of the rotor is called a step.
The magnitude of a step depends on the number of field windings and either on the number of rotor projections (for a variable-reluctance stepper motor) or on the number of salient poles (for a permanent-magnet stepper motor). The step is usually 1.5°–3° for variable-reluctance motors or 15° for permanent-magnet stepper motors. A permanent-magnet stepper motor makes it possible to obtain a relatively high torque and ensures that the rotor does not move when the windings are not energized.
Stepper motors are used in electric stepping drives.
REFERENCES
Ratmirov, V. A., and B. A. Ivobotenko. Shagovye dvigateli dlia sistern avtomaticheskogo upravleniia. Moscow-Leningrad, 1962.Chechet, Iu. S. Elektricheskie mikromashiny avtomaticheskikh ustroistv, 2nd ed. Moscow, 1964.
Bruskin, D. E., A. E. Zorokhovich, and V. S. Khvostov. Elektricheskie mashiny i mikromashiny. Moscow, 1971.
M. D. NAKHODKIN