PID
This article is provided by FOLDOC - Free Online Dictionary of Computing (foldoc.org)
PID
(1) (Process IDentifier) A temporary number assigned by the operating system to a process or service.(2) (Proportional-Integral-Derivative) The most common control methodology in process control. It is a continuous feedback loop that keeps the process flowing normally by taking corrective action whenever there is any deviation from the desired value ("setpoint") of the process variable (rate of flow, temperature, voltage, etc.). An "error" occurs when an operator manually changes the setpoint or when an event (valve opened, closed, etc.) or a disturbance changes the load, thus causing a change in the process variable.
The PID controller receives signals from sensors and computes corrective action to the actuators from a computation based on the error (proportional), the sum of all previous errors (integral) and the rate of change of the error (derivative). See PAC.
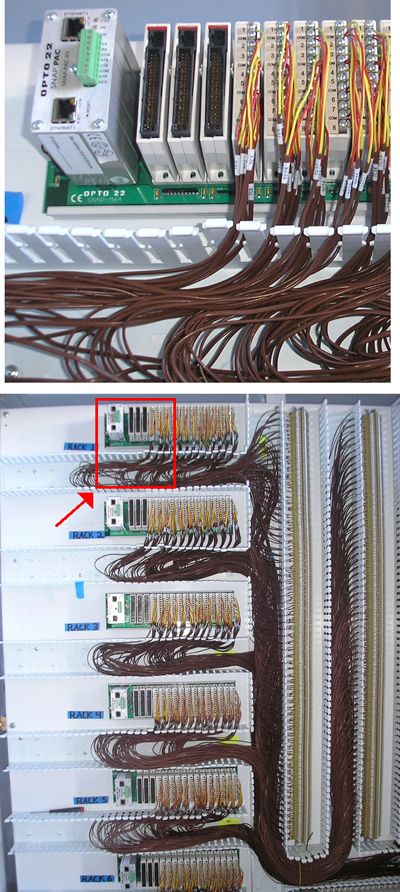 |
| Inputs from a PID |
|---|
| The large white boxes are Opto 22 SNAP PACs, which are programmable automation controllers that are processing the PID loops in Chevron's research facility in Richmond, Virginia. The wires come from thermocouples that sense pipe temperature in a laboratory test that analyzes the best way to break down crude oil. The PACs determine when to raise and lower the temperature, and the three modules with the black sockets send digital signals to the heaters (cables not connected in this image). (Image courtesy of Opto 22, www.opto22.com) |
Copyright © 1981-2025 by The Computer Language Company Inc. All Rights reserved. THIS DEFINITION IS FOR PERSONAL USE ONLY. All other reproduction is strictly prohibited without permission from the publisher.