robot
robot
[′rō‚bät]robot
(robotics)See also cybernetics.
robot
(chat)robot
(World-Wide Web)robot
A stand-alone hybrid computer system that performs physical and computational activities. Capable of performing many tasks, a robot is a multiple-motion device with one or more arms and joints. Robots can be similar in form to a human, but industrial robots do not resemble people at all.The term is attributed to Czech dramatist Karel Capek in his 1921 play titled "R.U.R. - Rossum's Universal Robots." Capek applied the Czech word "robota," which means "forced labor" or "servitude" to the mechanized people in the skit. Three years later, robots appeared in Fritz Lang's classic silent movie "Metropolis," and they have been with us ever since.
A Wide Variety of Applications
In manufacturing, robots are used for welding, riveting, scraping and painting. They are also deployed for demolition, fire and bomb fighting, nuclear site inspection, industrial cleaning, laboratory use, medical surgery (see telepresence surgery), agriculture, forestry, office mail delivery as well as many other tasks. Increasingly, more artificial intelligence is being added. For example, some robots can identify objects in a pile, select the objects in the appropriate sequence and assemble them into a unit (see AI).
Analog and Digital
Robots use analog sensors for recognizing real-world objects and digital computers for direction. Analog to digital converters convert temperature, motion, pressure, sound and images into binary code for the robot's computer, which directs the actions of the arms and joints by pulsing their motors. See AIBO.
 |
| Shakey the Robot |
|---|
| Developed in 1969 by the Stanford Research Institute, Shakey was the first fully mobile robot with artificial intelligence. Shakey is seven feet tall and was named after its rather unstable movements. (Image courtesy of The Computer History Museum, www.computerhistory.org.) |
 |
| Huey, Dewey and Louie |
|---|
| At the turn of the century, these robots were applying sealant to cars at Ford's Wayne, Michigan plant. Named after Donald Duck's nephews, Huey (top) sealed the drip rails while Dewey (right) sealed the interior weld seams. Louie is outside the view of this photo. (Image courtesy of Ford Motor Company.) |
 |
| Inspect Pipes from the Inside |
|---|
| Developed years ago by SRI for Osaka Gas in Japan, this Magnetically Attached General Purpose Inspection Engine (MAGPIE) traveled inside gas pipes to look for leaks. MAGPIE served as the prototype for multicar models that perform temporary repairs. (Image courtesy of SRI International.) |
 |
| Computers Making Computers |
|---|
| Robots, whose brains are nothing but chips, are making chips in this TI fabrication plant. (Image courtesy of Texas Instruments, Inc.) |
 |
| Sophia - A More Realistic Android |
|---|
| Hanson Robotics designed Sophia to look like British actress Audrey Hepburn. Debutting in 2015, her flesh-rubber skin is very realistic, and her answers to questions (using the cloud) are very clever. On the Tonight Show with Jimmy Fallon in 2017, she played rock paper scissors and won. (Image courtesy of Hanson Robotics, www.hansonrobotics.com) |
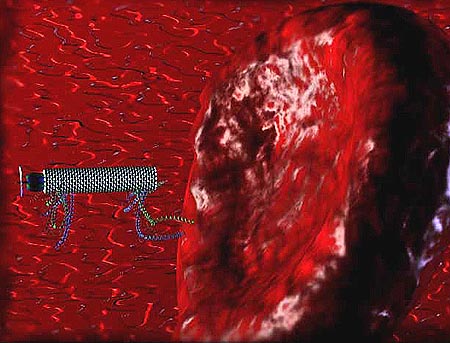 |
| How Small Can They Get? |
|---|
| Rutgers University scientists believe that nano-sized robots injected into the bloodstream will eventually administer drugs directly to infected cells. This carbon nanotube body uses a biomolecular motor for propulsion and peptide limbs for orientation. (Image courtesy of the Rutgers Bio-Nano Robotics team: Constantinos Mavroidis, Martin L. Yarmush, Atul Dubey, Angela Thornton, Kevin Nikitczuk, Silvina Tomassone, Fotios Papadimitrakopoulos and Bernie Yurke.) |
 |
| Where's the Pasta... Oh Hello! |
|---|
| By 2020, robots were no longer only in warehouses and assembly lines. Turn the aisle in the local Giant supermarket, and Marty the robot might be staring at you. Marty roams the aisles looking for spills and debris and alerts the manager when a hazard is found. |
Robot
a machine with anthropomorphic actions that partially or completely performs human and sometimes animal functions in interaction with the environment. The term “robot” was first introduced by K. Čapek in his play R. U. R. (1920), in which mechanical people were called robots.
With the development of robot technology, three types of robots evolved: robots with a fixed program of actions, robots controlled by a human operator, and robots with artificial intelligence; those of the last type operate purposefully without human intervention. Most modern robots of all three types are robot-manipulators, although there are also other types, for example, information robots and walking robots. It is possible to combine robots of the first and second types in a single unit by dividing the robot’s functions over time. It is also possible for a man to work jointly with the third type of robot, with the man acting in a supervisory capacity. The first robots—androids that imitated the movements and had the external appearance of humans—were used primarily for entertainment. Since the 1930’s, in connection with the automation of production, automatic robots have been used in industry along with traditional means of automating production processes, particularly in small-lot production and in shops with harmful working conditions (see Figure 1).
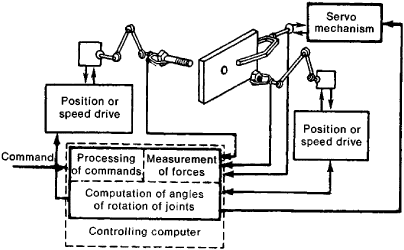
An industrial robot-manipulator has one or several mechanical arms and a remote-control console or a built-in programmed control unit, or, more rarely, a computer. It can move objects weighing up to several tens of kilograms within the operating radius of its mechanical arms (up to 2 m) and can perform 200 to 1,000 movements an hour. Industrial robot-automatons are superior to the human being in speed and precision in performing uniform manual operations. The most common types of robots are robot-manipulators equipped with remote control and a mechanical arm mounted on a mobile or fixed base. The operator controls the movement of the arm while observing the arm either directly or on a television screen; in the latter case, the robot is equipped with a transmitting television camera. Robots are often provided with automatic learning systems. If such a robot is “shown” a sequence of operations, the control system records the sequence in the form of a control program and then exactly reproduces the sequence during work.
Robot-manipulators are used for work in relatively inaccessible places or under conditions that are dangerous or harmful for human beings, for example, in nuclear industry, where they have been used since the 1950’s. The 1960’s saw the appearance of various designs of robot-manipulators, used for a variety of purposes. They include controlled deepwater devices with mechanical arms used to obtain rock samples from the ocean floor, platforms that creep along the ocean floor carrying research equipment, and underwater bulldozers and drilling rigs.
In the late 1960’s there was a new trend in robot technology involving the development of decision-making robots. Such robots are equipped with sensors that receive information on the surroundings, a unit to process the information received (the artificial intelligence) consisting of a specialized computer with a set of programs, and actuating mechanisms (the motor system). The actions of decision-making robots have certain characteristics of human behavior. The sensors gather information about objects in the environment and about the properties and interactions of these objects. On the basis of these data, the artificial intelligence formulates a model of the environment and decides on the sequence of robot actions, which are carried out by the actuating mechanisms. By 1975 such decision-making robots had been tested in trial runs in industry.
REFERENCES
Chelovecheskie sposobnosti mashin. Moscow, 1971. (Translated from English.)Kobrinskii, A. E. Votoni—roboty. Moscow, 1972.
Teoriia i ustroistvo manipuliatorov: Sb. st. Moscow, 1973.
Integral’nye roboty. Moscow, 1973. (Translated from English.)
Popov, E. P. Roboty-manipuliatory. Moscow, 1974.
L. N. STOLIAROV